Palos Verdes Institute of Technology
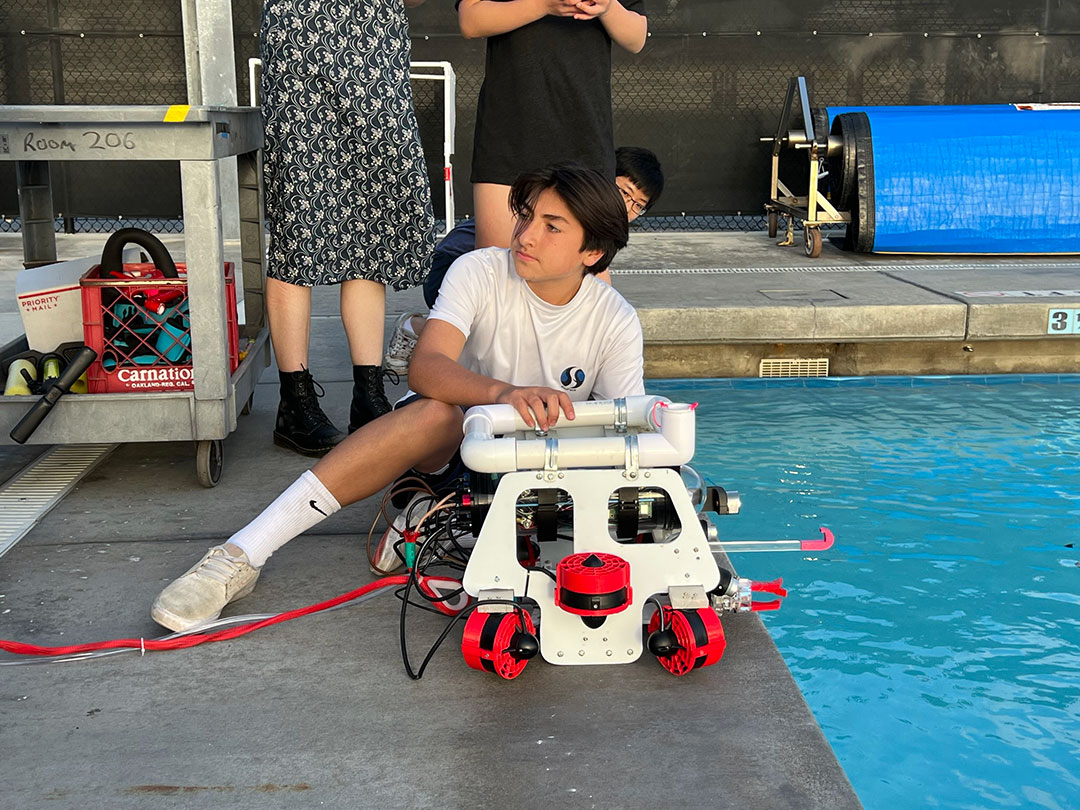

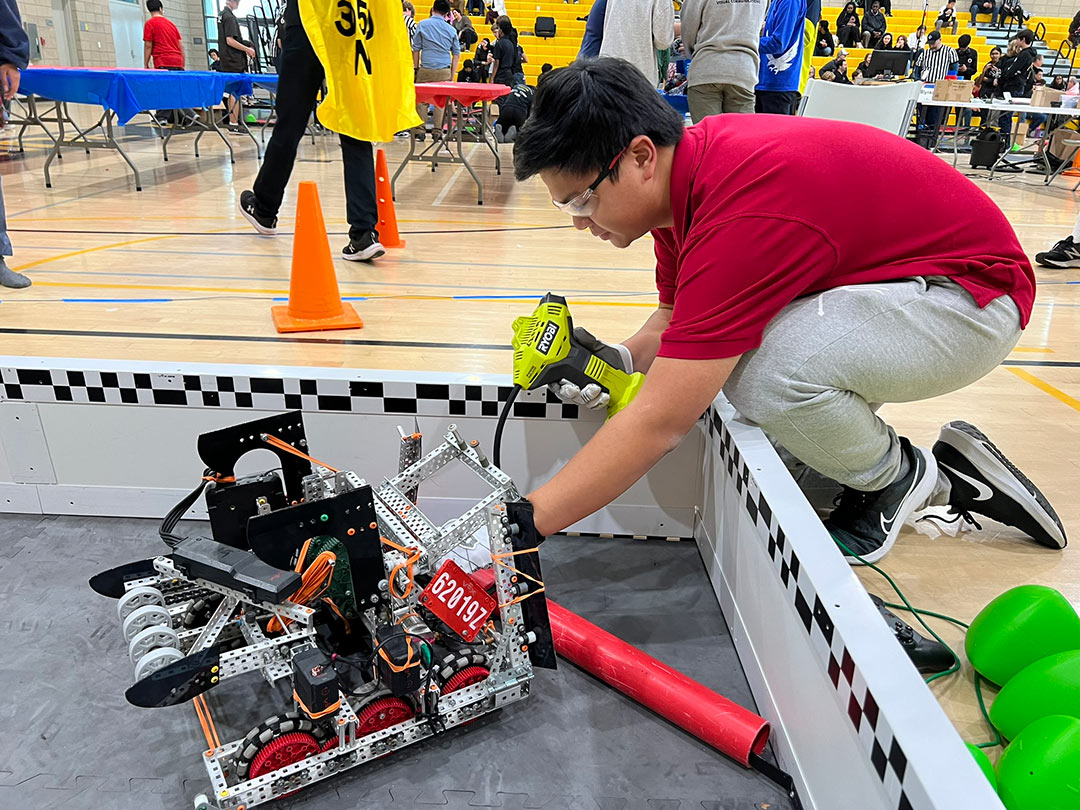







The Palos Verdes Institute of Technology (PVIT) is featured as one of the first high school robotics programs in the nation, competing as the only high school against top universities in the 2005 DARPA “Grand Challenge”. Following this success, the PVHS PVIT program has continually grown to offer engineering coursework, competitions, internships, mentoring, and research. PVIT utilizes the Project Lead the Way (PLTW) curriculum which offers a flexible sequence of courses that builds student’s engineering and technology skills. In addition, through PVIT’s Engineering Advanced Project class, engineering teams building underwater robots, rockets, high altitude balloons, autonomous robots, an electric car and more, have competed and placed regionally, nationally, and internationally in high-end engineering competitions, involving designing and building very technical, custom hardware. The sheer nature of PVIT exposes students to real engineering problems that empowers them to learn real engineering skills. PVHS has linked math/science classes with PLTW courses which are recognized by UC and CSU and meet the “g” subject requirement.
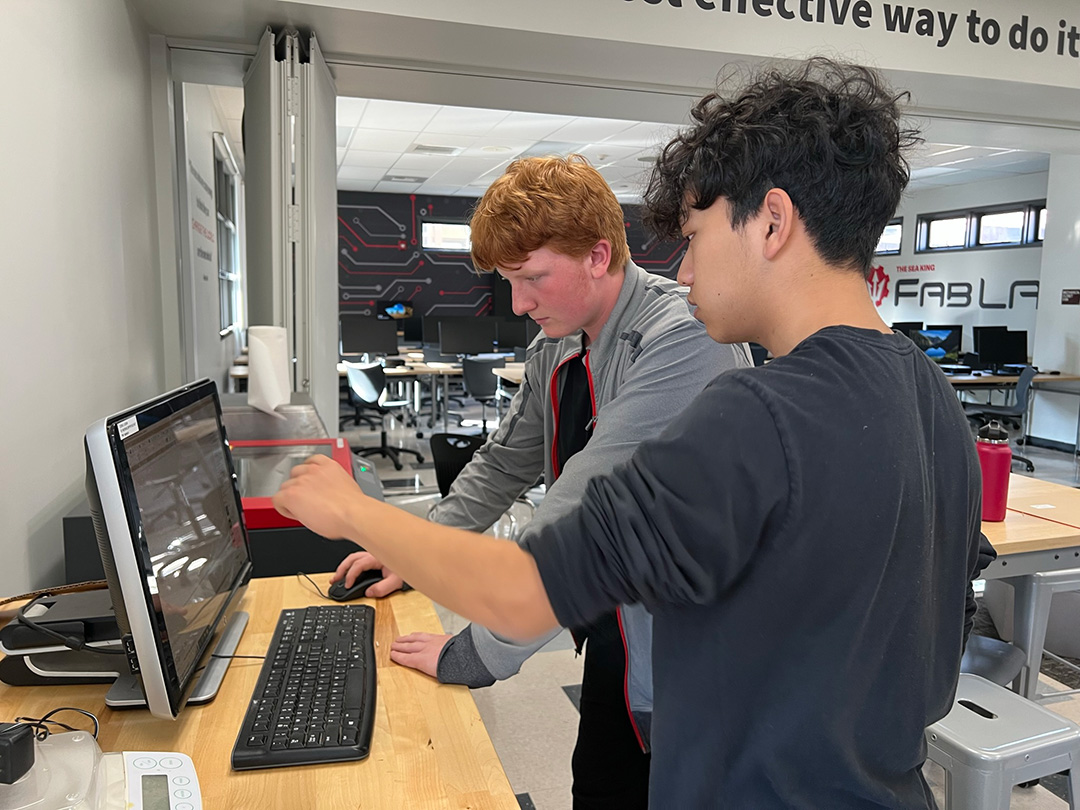
PVIT stands out among other high school engineering programs in that we are very student-centered. We have many teams to meet the interests of our students, and smaller teams so everyone gets the valuable hands-on experience. The vast majority of high school robotics programs focus on one or two of the biggest robotics competitions, which we have at PVIT, but we also offer a variety of other engineering teams and technologies. To maximize our students’ experiences, we have many smaller teams so everyone has a chance to experience real engineering – we don’t have to crowd 50-80 students around one robot because of our smaller teams. We allow our students to make their own decisions, whether it leads to success or failure, because it is through these failures that our students learn the most engineering and problem-solving. Our dozens of professional engineering mentors, representing hundreds of years of engineering experience spanning mechanical, electrical, aerospace, and software engineering, meet with students every week to mentor them on professional engineering practices.
PVIT Weekly Meetings
When: Every Sunday 2:00-4:00pm
What: Join a team and do fun hands-on engineering projects!
Contact Us
Teachers: Jim Warren and Lorraine Loh-Norris (program co-directors)
Julie Maemoto, Jennifer Cho, Michael Swatek, Young Min Kwak, Donna Wanner
Rooms: 603, 512, 513
Phone: 310-378-8471 X43289
[email protected]
[email protected]
Website Design and Development: Patricia Gill, Webmaster | saidthespider.net | © 2024 Palos Verdes Institute of Technology, Palos Verdes High School. All rights reserved.